Калибровка датчика
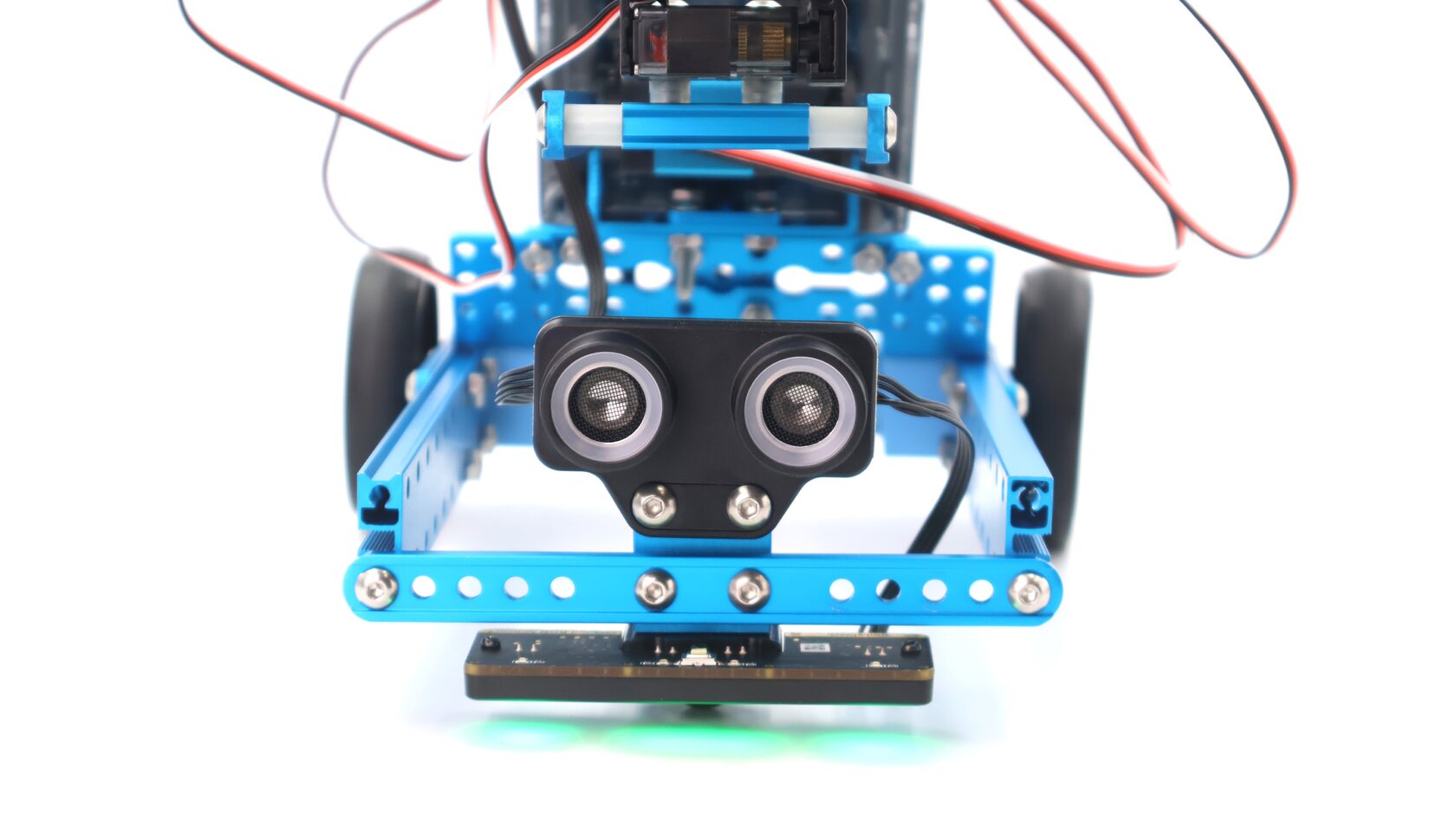
Перед началом программирования для движения по линии необходимо выполнить калибровку датчика QUAD RGB, чтобы наш робот понял, что считать за фон, а что за линию. Для калибровки датчика используется кнопка в его верхней части.
Калибровка робота, следующего по линии, предполагает настройку его датчиков и управляющих механизмов для точного обнаружения и следования за заданной траекторией. Ниже приведены основные этапы движения по линии в робототехнике:
Расположение датчиков
Учет условий окружающей среды
Расположение датчиков
- Позиционирование: Убедитесь, что датчики размещены на оптимальной высоте над поверхностью и правильно ориентированы для обнаружения линии.
- Расстояние: Поддерживайте постоянное расстояние от поверхности, чтобы избежать погрешностей при обнаружении линии из-за неровностей покрытия.
Учет условий окружающей среды
- Переменное освещение: Учитывайте изменения условий освещения и их влияние на показания датчиков. Калибруйте робота как для помещений, так и для уличной среды.
- Разнообразие поверхностей: Тестируйте робота на различных покрытиях, чтобы обеспечить стабильную работу на разных текстурах и цветах.
Правила проведения калибровки:
Длинное нажатие: переключает цвет заполняющего света. Обычно данная функция не используется, так как цвет задается автоматически во время калибровки. Но некоторые условия освещения требуют ручной регулировки
Двойное нажатие включает режим калибровки.
- Расположите датчик на фон карты с линией, по которой необходимо будет двигаться.
- Дважды нажмите на кнопку на QUAD RGB датчике.
- Когда вы увидите, что светодиодные индикаторы движения по линии начали быстро мигать, проведите датчиком над линией до тех пор, пока индикаторы не перестанут мигать.
Данный процесс занимает около 2,5 секунд. Полученные значения параметров сохраняются автоматически.

На заметку
Если вам необходимо ездить по линии, на которой есть желтые сегменты, то калибровку лучше проводить над ним. Иными словами мы выбираем участок линии с меньшей контрастностью между фоном и линией.