Рассмотрим несколько вариантов устройств захвата. Постепенно увеличивая количество степеней свободы нашего механизма, а значит и количество используемых сервоприводов
Степень свободы (DOF)определяет максимальное количество независимых движений, которые может выполнять машина.
Устройство захвата с одним сервоприводом
Самый простой вариант захвата, который можно предложить, например, для миссии по перетаскиванию кубов в зону переработки, это использование неподвижной балки и клешню-фиксатор на сервоприводе:
Вы также можете сконструировать захват на основе одного сервопривода с использованием шестеренок:
+
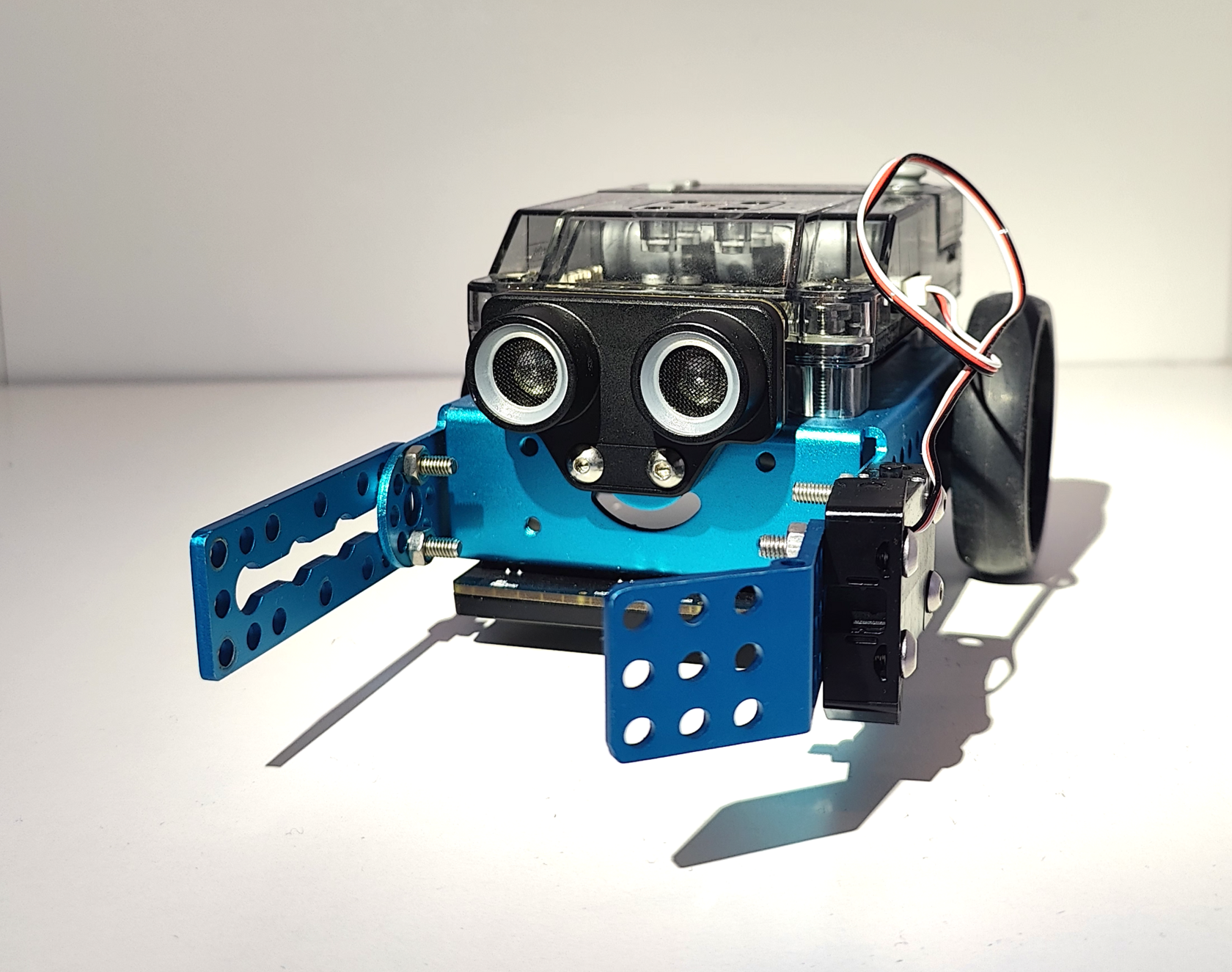
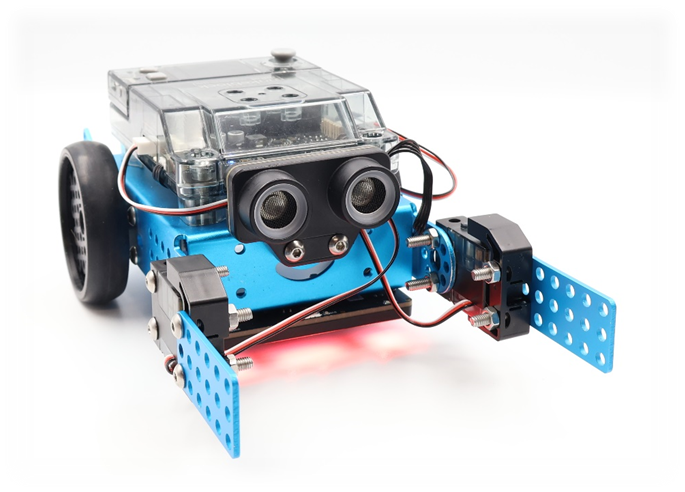
Устройство захвата с двумя сервоприводами
На двух сервоприводах вы сможете создать захват для работы с большими объектами без возможности их подъема, например, вот так:
Или сделать захват с возможностью поднимать реквизит вверх и вниз за счет использования параллельных балок:
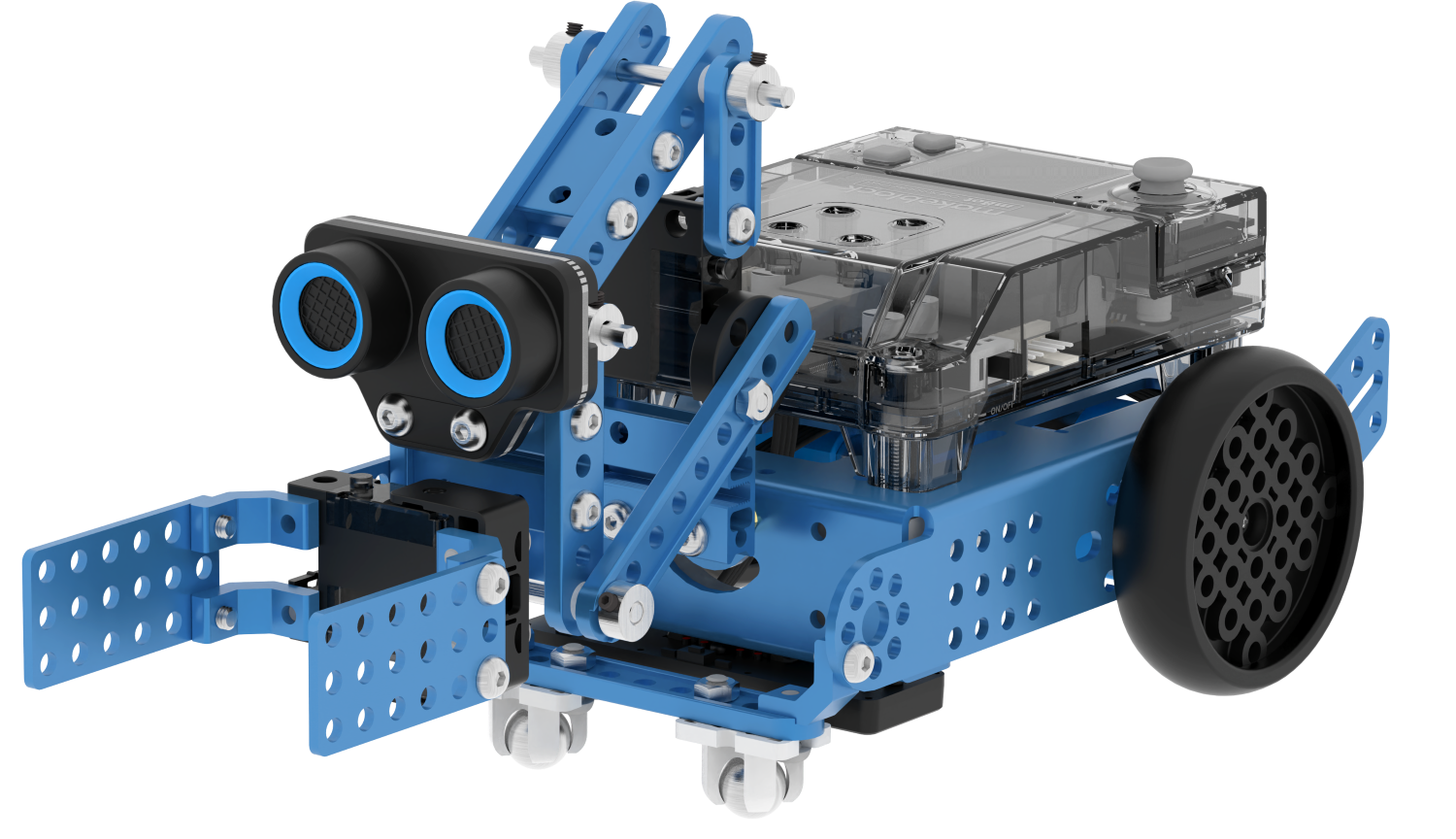
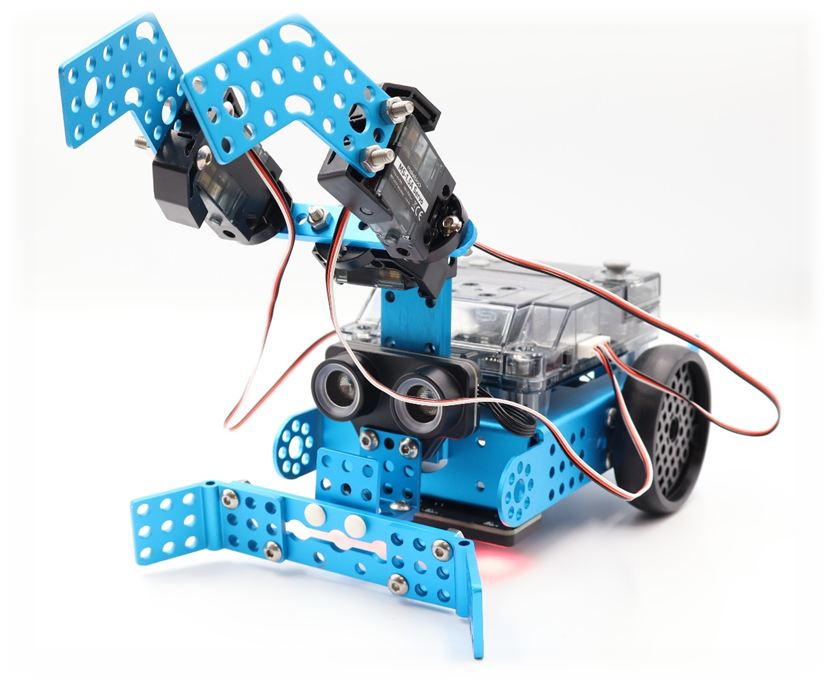
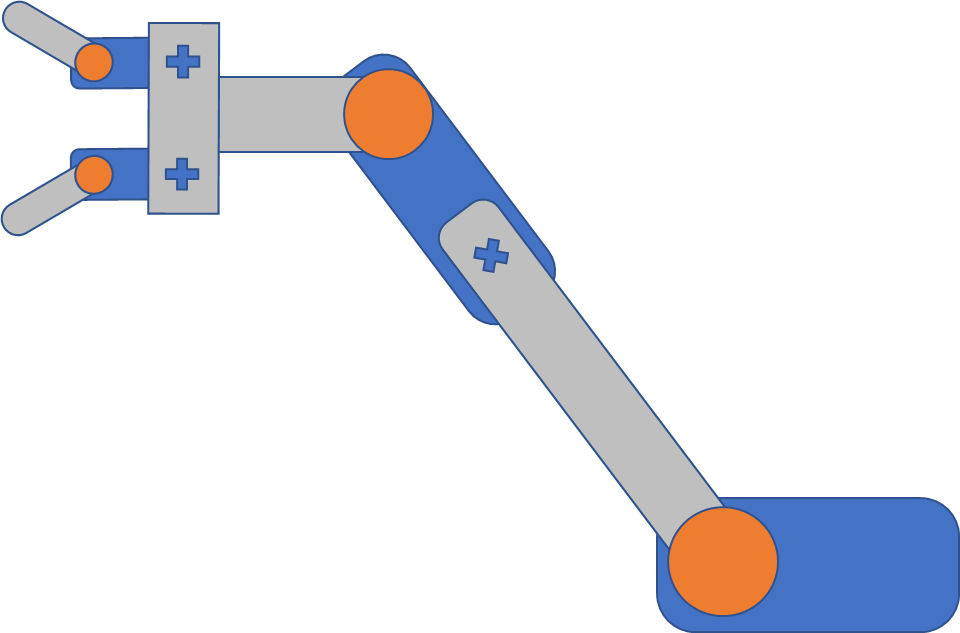
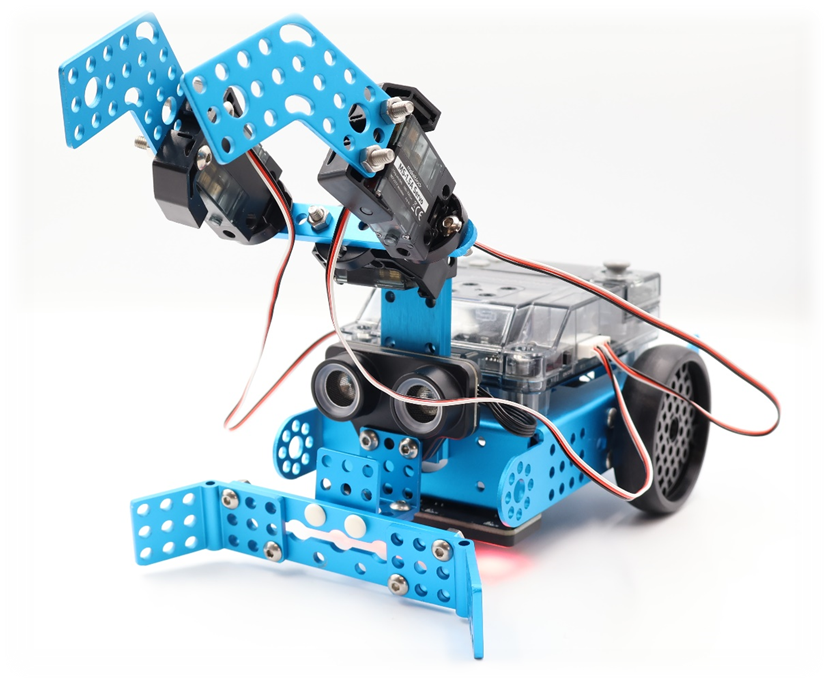
Устройство захвата с тремя сервоприводами
На трех сервоприводах уже можно создать захват для работы с большими объектами и возможностью поднимать их вверх и вниз. Обратите внимание на крепление манипуляционного устройства, такой вариант обеспечивает захват реквизита сверху:
Конструкции с большими степенями свободыСкорее всего для создания механизмов с большей степенью свободы, вам потребуется использовать сервоприводы с более высоким крутящим моментом, но они запрещены регламентом соревнований MakeX Starter
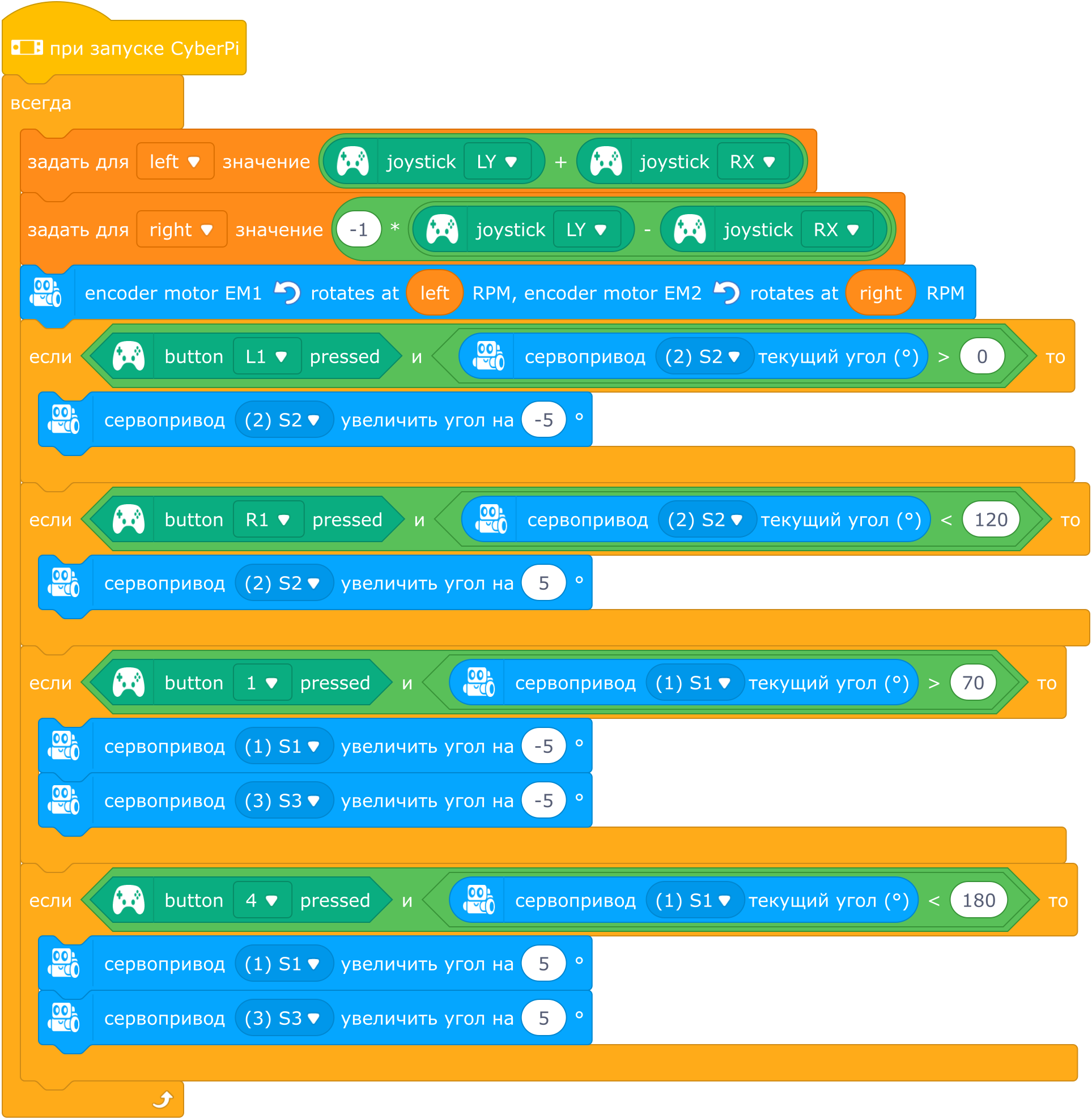
Программирование устройства захвата
Установите хват на мобильного робота и подключите сервоприводы к портам на плате расширения mBot2 Shield. Переключите в режим Онлайн и проведите эксперимент по очереди с каждым сервоприводом для понимания механики движения и определения нужных значений. В нашем случае получилось:

Теперь дополним программу управления с джойстика новыми блоками, которые позволят нам независимо управлять сервоприводами для захвата реквизита на поле. Выбор кнопок управления и принцип изменения параметров может отличаться для вашей конструкции.
Польза тренировок
Очень важно оттачивать управление вашим роботом на различном реквизите, в процессе работы вероятно окажется, что удобнее использовать другие кнопки управления. Полезно задать пресеты для захвата препятствий на разной высоте, чтобы оператору оставалось, только подъехать и выполнить захват объекта. Для этого просто напишите условие для обработки нажатий кнопок, например, 1, 2, 3 и 4 и задайте в них конкретные значения сервоприводов.
Очень важно оттачивать управление вашим роботом на различном реквизите, в процессе работы вероятно окажется, что удобнее использовать другие кнопки управления. Полезно задать пресеты для захвата препятствий на разной высоте, чтобы оператору оставалось, только подъехать и выполнить захват объекта. Для этого просто напишите условие для обработки нажатий кнопок, например, 1, 2, 3 и 4 и задайте в них конкретные значения сервоприводов.
Для тренировки можно устраивать внутренние соревнования по перемещению реквизита на скорость.